PCA 9685是一款适用于红/绿/蓝/琥珀(RGBA)彩色背光应用的I S 2 C总线控制的16通道LED控制器。每个LED输出有自己的12位分辨率(4096步)固定频率...最常用的就是16路舵机驱动板上,主要通过IIC控制舵机转向控制或电机调速
”PCA968 16路舵机驱 PWM调速 IIC“ 的搜索结果
PWM-pca9685-16路舵机IIC程序
基于MDK Keil5编程,STM32F103驱动PCA9685控制器,16路舵机驱动模块,IIC通信.
PCA9685接线、PCA9685简介、PCA9685地址位寄存器、MODE1寄存器,地址0x00,可读、可写、寄存器地址、PCA9685代码注解、PCA9685数据写入、PCA9685数据读取、PCA9685的频率设置、PCA9685的PWM设置、舵机转动角度置换、...
Jetson Nano B01 带emmc模组版本,也就是国产套件,无法通过...这里提供直接修改设备树文件的方式来开启pwm. 笔者目前只验证了JetPack4.6.2, 本次操作需要重装系统,请用户谨慎操作。官方B01套件请直接参考打开PWM.
雕爷学编程,Arduino动手做,开源硬件,创客传感器,16路PWM舵机驱动板PCA9685
PCA9685是一款基于IIC总线通信的12位精度16通道PWM波输出的芯片,该芯片最初由NXP推出时主要面向LED开关调光, 16路12位PWM信号发生器,可用于控制舵机、led、电机等设备,i2c通信,节省主机资源。就是想控制好几.....
51单片机 驱动16路模块 PWM/ 舵机驱动板 控制器 机器人 IIC PCA9685 部分程序如下 #include <reg52.h> #include <intrins.h> #include #include typedef unsigned char uchar; typedef unsigned int uint; ...




淘宝上卖的16路PWM舵机驱动模块的51单片机程序 部分程序如下 #include <reg52.h> #include <intrins.h> #include #include typedef unsigned char uchar; typedef unsigned int uint; sbit scl=P1^3; //时钟...
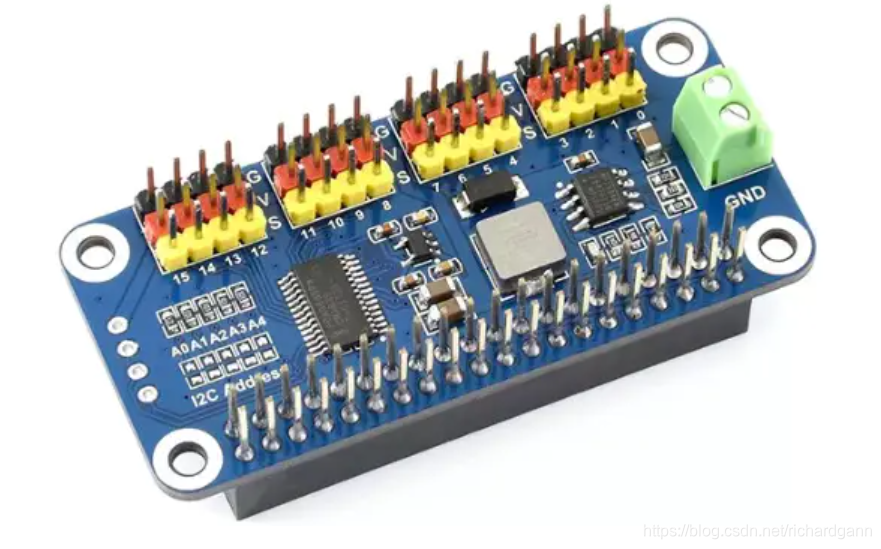
PCA9685是一个基于IIC通信的16路PWM输出模块,可以在单片机资源不足的情况下进行扩展使用。i2c通信,只需要2根i2c线就可以控制16路pwm,周期和占空比都可控。可以多个模块级联。箭头部分可以更改设备id。可以控制16...

IIC协议的概述: ...利用stc12c5a60s2单片机的iic通信,驱动pca9685,因为采用了9个舵机,所以不需要短接驱动板上的焊点,驱动的scl,sda对应接单片机的就好,vcc接3.3v,然后v+和gnd要给5v,插上9个
PCA 9685是一款适用于红/绿/蓝/琥珀(RGBA)彩色背光...最常用的就是16路舵机驱动板上,主要通过IIC控制舵机转向控制或电机调速 相关下载链接://download.csdn.net/download/weixin_42108484/11123300?utm_source=bbsseo

而我用的主控板只有两路pwm输出,不能满足要求,所以在查阅了相关资料后,找到了PCA9685模块。因为网上对PCA9685模块的介绍很多,这里就不再详细介绍。贴上我认为介绍比较详细的链接: PCA9685模块详细介绍 其中主要...

STM32F407通过IIC与pca9685(16路12位PWM发生器)通信),通过USART2串口与HC06(蓝牙模块)通信,实现蓝牙控制8路舵机,keil MDK工程
51单片机PCA9685控制16路舵机 /************************************************************************** PCA9685模块简单应用 平台:STC89C52RC,晶振:11.0592 ******************************************...
PWM控制舵机简介通常情况下,伺服电机(舵机)是由一个标准的直流系统和一个内部反馈控制装置(一个减速齿轮和电位计)来组成的。伺服电机(舵机)的主要作用是将齿轮轴旋转到一个预定义的方向上。伺服电机(舵机)有3个输入...

本文修改于... 若有侵权,联系删除 pca9685.c #include "pca9685.h" #include "delay.h" #include "myiic.h" #include <math.h> void PCA9685_write(unsigned ch...
概要阿凯在本文中讲解了如何使用MicroPython-ESP32通过PCA9685模块控制舵机旋转角度。同时也涉及到了MicroPython-ESP32的I2C资源与API讲解。出品:1Z实验室 (1ZLAB: Make Things Easy)目录PCA9685模块简介pca9685....
刚买了pca9685模块,看数据手册没有中文的只好找了些别人stm32的代码改过来用在51上面,但是一直都驱动不了舵机,不是知道代码出了什么问题,求解 以下就是我用的所有源码。 ``` #ifndef __IIC_H #define __...
IIC概述 I2C(Inter-Integrated Circuit BUS) 集成电路总线,该总线由NXP(原PHILIPS)公司设计,多用于主控制器和从器件间的主从通信,在小数据量场合使用,传输距离短,任意时刻只能有一个主机等特性。 经常IIC和...
iic协议、以及PCA9685如何通过IIC协议控制多个舵机 1.iic协议 IIC协议是二线制,信号线包含SDA和SCL,且信号线是双向的,开路结构,需要通过上拉电阻到VCC,具体的电阻值影响的是信号反应速度和驱动能力。 硬件接口...
推荐文章
- Win8蓝屏(WHEA_UNCORRECTABLE_ERROR)-程序员宅基地
- 案例课1——科大讯飞_科大讯飞培训案例-程序员宅基地
- perl下载与安装教程【工具使用】-程序员宅基地
- 安装VS2008 SP1-程序员宅基地
- UITextField添加点击高亮状态_uitextfield return高亮状态-程序员宅基地
- 8421 BCD码 加减校正_负数的8421码-程序员宅基地
- spaCy V3.0 基于规则匹配(3)----基于规则的命名实体识别NER_spacy ner-程序员宅基地
- 悼念512汶川大地震遇难同胞——珍惜现在,感恩生活(多重背包)-程序员宅基地
- Android源码设计模式探索与实战【面向对象六大基本原则】_android源码设计模式第2版 csdn-程序员宅基地
- 这台计算机似乎没有安装操作系统_前沿科技 | 浙江大学科学家联合之江实验室成功研制全球神经元规模最大的类脑计算机...-程序员宅基地